Kinpy
Simple kinematics calculation toolkit for robotics
Install / Use
/learn @neka-nat/KinpyREADME
<img src="https://raw.githubusercontent.com/neka-nat/kinpy/master/assets/logo.png" width="400" />
![]()
![]()
![]()
Simple kinematics body toolkit.
Core features
- Pure python library.
- Support URDF, SDF and MJCF file.
- Calculate FK, IK and jacobian.

Installation
pip install kinpy
# or install with visualization support
pip install kinpy[all]
Getting started
Here is a program that reads urdf and generates a kinematic chain.
import kinpy as kp
chain = kp.build_chain_from_urdf(open("kuka_iiwa/model.urdf").read())
print(chain)
# lbr_iiwa_link_0_frame
# └──── lbr_iiwa_link_1_frame
# └──── lbr_iiwa_link_2_frame
# └──── lbr_iiwa_link_3_frame
# └──── lbr_iiwa_link_4_frame
# └──── lbr_iiwa_link_5_frame
# └──── lbr_iiwa_link_6_frame
# └──── lbr_iiwa_link_7_frame
Displays the parameter names of joint angles included in the chain.
print(chain.get_joint_parameter_names())
# ['lbr_iiwa_joint_1', 'lbr_iiwa_joint_2', 'lbr_iiwa_joint_3', 'lbr_iiwa_joint_4', 'lbr_iiwa_joint_5', 'lbr_iiwa_joint_6', 'lbr_iiwa_joint_7']
Given joint angle values, calculate forward kinematics.
import math
th = {'lbr_iiwa_joint_2': math.pi / 4.0, 'lbr_iiwa_joint_4': math.pi / 2.0}
ret = chain.forward_kinematics(th)
# {'lbr_iiwa_link_0': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.]), 'lbr_iiwa_link_1': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.1575]), 'lbr_iiwa_link_2': Transform(rot=[-0.27059805 0.27059805 0.65328148 0.65328148], pos=[0. 0. 0.36]), 'lbr_iiwa_link_3': Transform(rot=[-9.23879533e-01 3.96044251e-14 -3.82683432e-01 -1.96942462e-12], pos=[ 1.44603337e-01 -6.78179735e-13 5.04603337e-01]), 'lbr_iiwa_link_4': Transform(rot=[-0.65328148 -0.65328148 0.27059805 -0.27059805], pos=[ 2.96984848e-01 -3.37579445e-13 6.56984848e-01]), 'lbr_iiwa_link_5': Transform(rot=[ 2.84114655e-12 3.82683432e-01 -1.87377891e-12 -9.23879533e-01], pos=[ 1.66523647e-01 -1.00338887e-12 7.87446049e-01]), 'lbr_iiwa_link_6': Transform(rot=[-0.27059805 0.27059805 -0.65328148 -0.65328148], pos=[ 1.41421356e-02 -7.25873884e-13 9.39827561e-01]), 'lbr_iiwa_link_7': Transform(rot=[ 9.23879533e-01 2.61060896e-12 -3.82683432e-01 4.81056861e-12], pos=[-4.31335137e-02 -1.01819561e-12 9.97103210e-01])}
You can get the position and orientation of each link.
If you want to use IK or Jacobian, you need to create a SerialChain.
When creating a SerialChain, an end effector must be specified.
chain = kp.build_serial_chain_from_urdf(open("kuka_iiwa/model.urdf"), "lbr_iiwa_link_7")
th = [0.0, -math.pi / 4.0, 0.0, math.pi / 2.0, 0.0, math.pi / 4.0, 0.0]
ret = chain.forward_kinematics(th, end_only=True)
# chain.inverse_kinematics(ret)
# chain.jacobian(th)
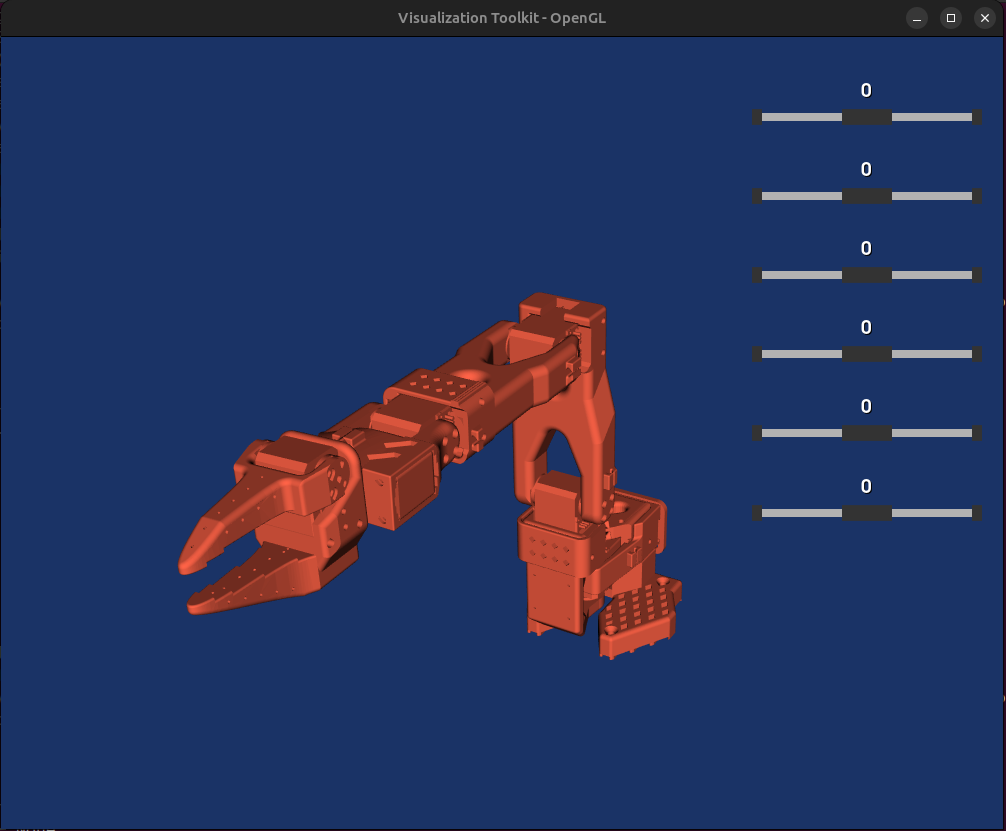
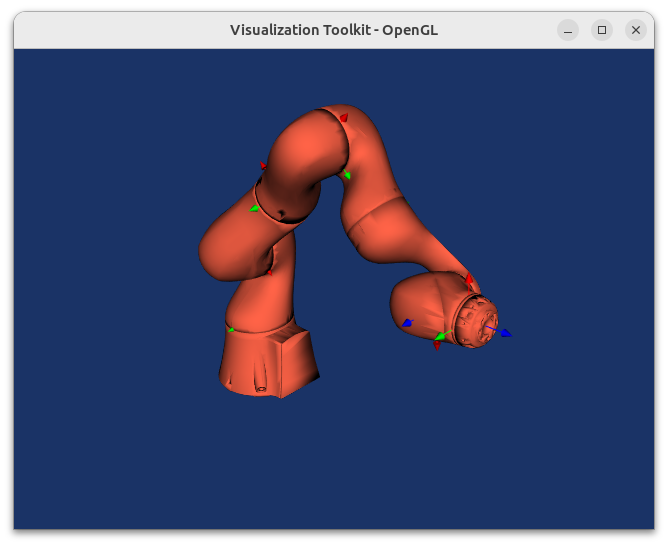
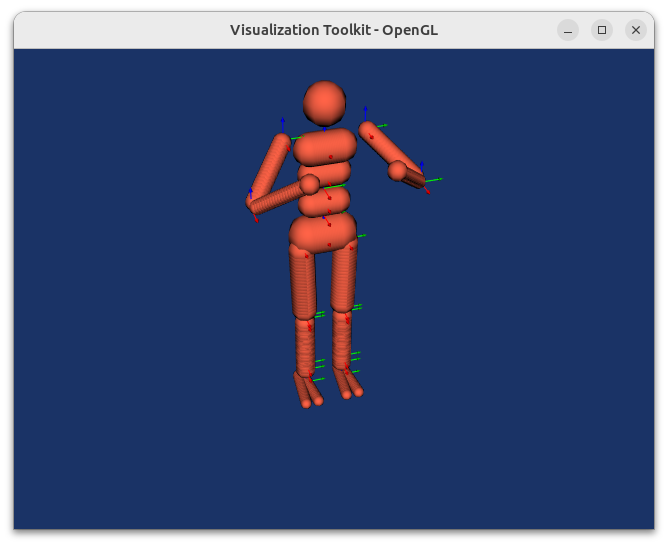
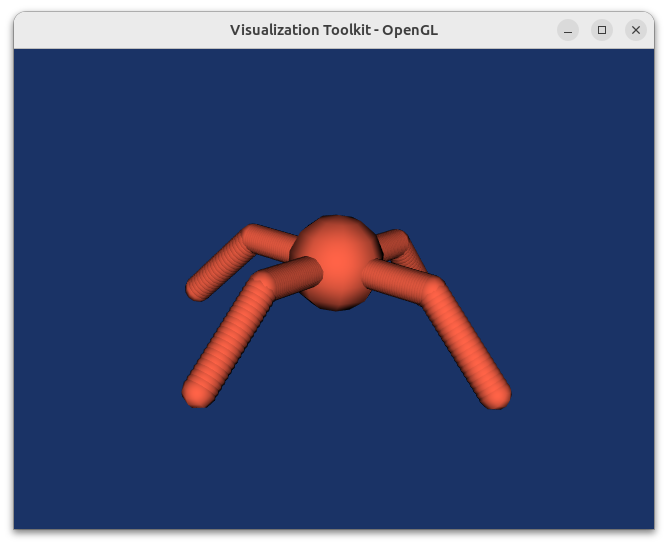
Visualization
SO101
KUKA IIWA
Mujoco humanoid
Mujoco ant
Simple arm
Citing
@software{kinpy,
author = {{Kenta-Tanaka et al.}},
title = {kinpy},
url = {https://github.com/neka-nat/kinpy},
version = {0.0.3},
date = {2019-10-11},
}
Related Skills
node-connect
330.7kDiagnose OpenClaw node connection and pairing failures for Android, iOS, and macOS companion apps
claude-opus-4-5-migration
81.4kMigrate prompts and code from Claude Sonnet 4.0, Sonnet 4.5, or Opus 4.1 to Opus 4.5
frontend-design
81.4kCreate distinctive, production-grade frontend interfaces with high design quality. Use this skill when the user asks to build web components, pages, or applications. Generates creative, polished code that avoids generic AI aesthetics.
model-usage
330.7kUse CodexBar CLI local cost usage to summarize per-model usage for Codex or Claude, including the current (most recent) model or a full model breakdown. Trigger when asked for model-level usage/cost data from codexbar, or when you need a scriptable per-model summary from codexbar cost JSON.
