Mvsim
Vehicle and mobile robotics simulator. C++ & Python API. Use it as a standalone application or via ROS 1 or ROS 2
Install / Use
/learn @MRPT/MvsimREADME
MultiVehicle Simulator (MVSim)
Lightweight, realistic 2.5D dynamics simulator for mobile robots and multi-agent research
![]()
![]()
![]()
Documentation · Installation · Demo worlds · Cite
</div>Overview
MVSim simulates wheeled robots and vehicles with realistic physics, sensors, and multi-agent support. It is designed to be fast enough for large-scale experiments while remaining accurate enough for dynamics and sensor research.
Key properties:
- Fully configured via XML world files — no code changes needed for most experiments.
- Works standalone, as a ROS 2 node, or embedded in a C++ / Python application.
- Headless mode for CI pipelines and Docker containers.
- Multi-vehicle worlds with mutual sensing (robots see each other in LiDAR).
https://github.com/user-attachments/assets/766db164-2d16-44f4-acbf-2f15b73c1ab3

https://github.com/user-attachments/assets/93c95aeb-71e9-4c35-b1dc-ba895c79daf7
Features
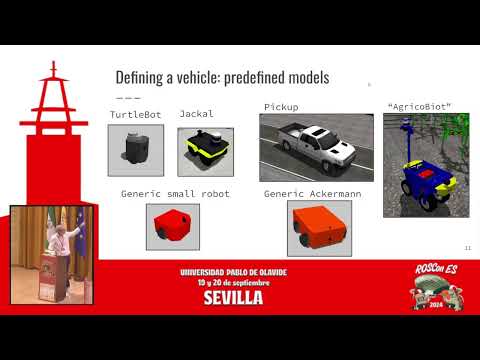
Vehicle dynamics
| Model | Description |
|---|---|
| differential | 2-wheel or 4-wheel differential drive (e.g. TurtleBot, Jackal) |
| ackermann | Car-like Ackermann steering with kinematic or dynamic control |
| ackermann_drivetrain | Ackermann + realistic mechanical differentials (open / Torsen, 2WD / 4WD) |
| Articulated | Trailer-style articulated vehicles |
Controllers available: raw torque, twist PID, ideal twist.
Friction models: default Coulomb, Ward-Iagnemma (off-road), ellipse (slip angle + slip ratio).
Sensors
| Sensor | Notes | |---|---| | 3D LiDARs | Velodyne VLP-16, Ouster OS1, Hesai Helios-32 (26°/31°/70° FOV) | | 2D LiDAR | Generic + RPLidar A2; optional GPU-based 3D ray-tracing | | RGB camera | Pinhole model, configurable intrinsics | | RGBD camera | Depth + color (RealSense / Xtion-style), publishes pointcloud, depth image | | IMU | White noise + bias random-walk (Forster 2016 model) | | GNSS / GPS | Requires georeferenced world; configurable noise |
World elements
- Occupancy grid maps (image or MRPT binary)
- Elevation meshes (terrain with height)
- Textured 3D blocks and custom meshes (
.dae,.obj) - Friction zones (spatially-varying
mu, rolling resistance) - Multi-storey environments
- Lighting configuration
- Remote resource caching
Interfaces
- ROS 2 — full topic / TF / parameter interface (see mvsim_node docs)
- ZMQ / Protobuf — language-agnostic pub/sub for custom clients
- Python — direct API access
- C++ library — embed the simulator in your application
Installation
ROS 2 (recommended)
sudo apt install ros-$ROS_DISTRO-mvsim
Then follow the first-steps guide.
Build from source
git clone https://github.com/MRPT/mvsim.git --recursive
See full installation instructions for cmake and colcon build options.
Quick start
Standalone:
mvsim launch mvsim_tutorial/demo_warehouse.world.xml
mvsim launch mvsim_tutorial/demo_2robots.world.xml
mvsim launch mvsim_tutorial/demo_greenhouse.world.xml
ROS 2:
ros2 launch mvsim demo_warehouse.launch.py
ros2 launch mvsim demo_depth_camera.launch.py
Move the robot with w/a/s/d (keyboard) or any standard cmd_vel publisher. In multi-robot worlds, press 1, 2, … to select the active robot.
See all demo worlds for the full list, including outdoor, road circuits, multi-storey, logistics center, articulated vehicles, and more.
ROS 2 build status
| Distro | Dev build | Binary releases | Version |
|---|---|---|---|
| Humble (u22.04) | | amd64
arm64
|

| amd64
arm64
|

| amd64
arm64
|

| amd64
arm64
|

| Distro | Last stable version |
|---|---|
| ROS 1 Noetic (u20.04) | 

ROSCon talk
Spanish talk with English slides and subtitles (slides):
Citation
If you use MVSim in your research, please cite:
@article{blanco2023mvsim,
title = {MultiVehicle Simulator (MVSim): Lightweight dynamics simulator for multiagents and mobile robotics research},
journal = {SoftwareX},
volume = {23},
pages = {101443},
year = {2023},
doi = {10.1016/j.softx.2023.101443},
url = {https://www.sciencedirect.com/science/article/pii/S2352711023001395},
author = {José-Luis Blanco-Claraco and Borys Tymchenko and Francisco José Mañas-Alvarez and Fernando Cañadas-Aránega and Ángel López-Gázquez and José Carlos Moreno}
}
License
3-clause BSD License. Copyright (C) 2014-2026 Jose Luis Blanco (University of Almeria) and contributors.
Related Skills
node-connect
341.8kDiagnose OpenClaw node connection and pairing failures for Android, iOS, and macOS companion apps
frontend-design
84.6kCreate distinctive, production-grade frontend interfaces with high design quality. Use this skill when the user asks to build web components, pages, or applications. Generates creative, polished code that avoids generic AI aesthetics.
openai-whisper-api
341.8kTranscribe audio via OpenAI Audio Transcriptions API (Whisper).
commit-push-pr
84.6kCommit, push, and open a PR
