ObjectTrackingDrone
Drone w/ camera gimbal controlled by Pixhawk and Raspberry Pi running OpenCV
Install / Use
/learn @rlew631/ObjectTrackingDroneREADME
Object Tracking Drone
Feel free to reach out if you have questions about the project. This project involved designing a drone to perform object tracking with:
- a Pixhawk flight controller
- a RaspberryPi
- a custom servo-based camera gimbal
This project uses the MavLink protocol and OpenCV to allow object detection and tracking on a drone controlled by a pixhawk flight controller.
This project assumes that you already have a XXXX-copter configured using QGroundControl software which is able to fly using the stabilized flight mode
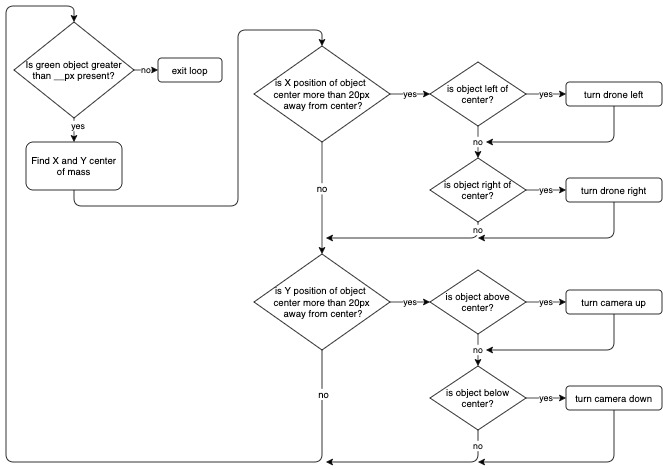
main_dat.py is the main program file that contains the mavlink initialization, main logic statements for switching between flight modes and other key componenets of the code. definitions.py contains the definitions for OpenCV, the individual mavlink commands etc. The control loop looks like the following:
Credits
Related Skills
node-connect
348.5kDiagnose OpenClaw node connection and pairing failures for Android, iOS, and macOS companion apps
frontend-design
109.1kCreate distinctive, production-grade frontend interfaces with high design quality. Use this skill when the user asks to build web components, pages, or applications. Generates creative, polished code that avoids generic AI aesthetics.
openai-whisper-api
348.5kTranscribe audio via OpenAI Audio Transcriptions API (Whisper).
qqbot-media
348.5kQQBot 富媒体收发能力。使用 <qqmedia> 标签,系统根据文件扩展名自动识别类型(图片/语音/视频/文件)。
