Neonavigation
A 2-D/3-DOF seamless global/local mobile robot motion planner package for ROS
Install / Use
/learn @at-wat/NeonavigationREADME
neonavigation meta-package
![]()
![]()
![]()
ROS meta-package for autonomous vehicle navigation.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
Important notices
- Topic/service namespace model is migrated to ROS recommended style. See each package's README and runtime migration messages from the nodes.
Install
- Note 1: neonavigation_msgs meta-package is required to build neonavigation meta-package.
- Note 2: neonavigation_rviz_plugins meta-package is required to visualize PathWithVelocity message used between planner_3d and trajectory_tracker.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/neonavigation.git
git clone https://github.com/at-wat/neonavigation_msgs.git
git clone https://github.com/at-wat/neonavigation_rviz_plugins.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
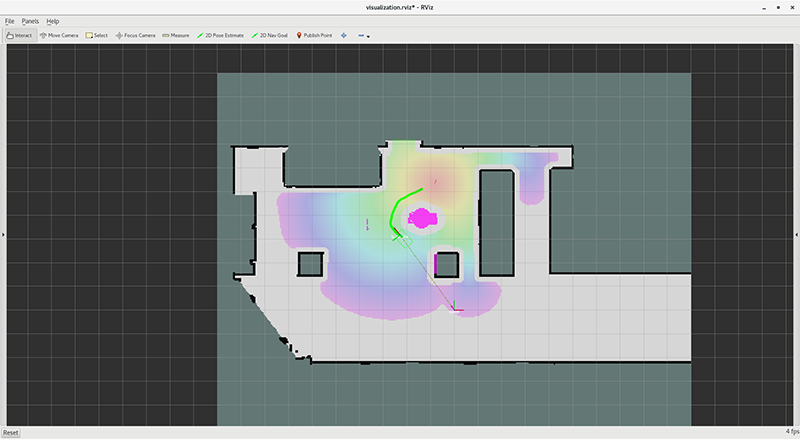
Demo
A quick demonstration with a simple simulated robot is available.
roslaunch neonavigation_launch demo.launch
Packages
costmap_cspace
3-DOF configuration space costmap handler.
planner_cspace
2-D/3-DOF seamless global-local path and motion planner and serial joint collision avoidance.
safety_limiter
Collision prevention control.
trajectory_tracker
Path following control and path handling.
map_organizer
Layered map handler.
track_odometry
Slip compensation for vehicle odometry.
obj_to_pointcloud
Obj surface data to pointcloud converter.
neonavigation_launch
Sample launch files.
References
A. Watanabe, D. Endo, G. Yamauchi and K. Nagatani, "Neonavigation meta-package: 2-D/3-DOF seamless global-local planner for ROS — Development and field test on the representative offshore oil plant," 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 2016, pp. 86-91. (doi: 10.1109/SSRR.2016.7784282)
Contributing
neonavigation meta-package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
neonavigation meta-package is available under BSD license.
Related Skills
node-connect
349.2kDiagnose OpenClaw node connection and pairing failures for Android, iOS, and macOS companion apps
frontend-design
109.5kCreate distinctive, production-grade frontend interfaces with high design quality. Use this skill when the user asks to build web components, pages, or applications. Generates creative, polished code that avoids generic AI aesthetics.
openai-whisper-api
349.2kTranscribe audio via OpenAI Audio Transcriptions API (Whisper).
qqbot-media
349.2kQQBot 富媒体收发能力。使用 <qqmedia> 标签,系统根据文件扩展名自动识别类型(图片/语音/视频/文件)。
