ESKF
Python implementation of the Error State Kalman Filter (ESKF). Estimates the pose of a fixed wing UAV with IMU and GNSS measurements. Tested and tuned using both a real and simulated dataset.
Install / Use
/learn @ludvigls/ESKFREADME
ESKF
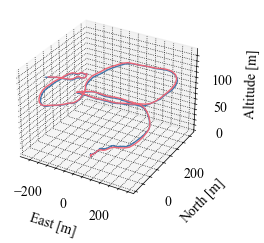
In this project the Error state Kalman Filter (ESKF) was implemented for a fixed wing UAV with IMU and GNSS sensors. It was tuned both for a simulated and a real dataset. The figure below shows the ground truth path in blue and the estimated path from the ESKF in red.
How to run
The ESKF with a simulated dataset.
python3 run_simulated_INS.py
The ESKF with a real life dataset.
python3 run_real_INS.py
Report
Check out report.pdf for more details.
