RobustPalmRoi
A robust algorithm for extracting ROI from palm image taken by mobile phone.
Install / Use
/learn @leosocy/RobustPalmRoiREADME
A robust algorithm for extracting ROI from palm image taken by mobile phone

![]()
![]()
![]()
![]()
![]()
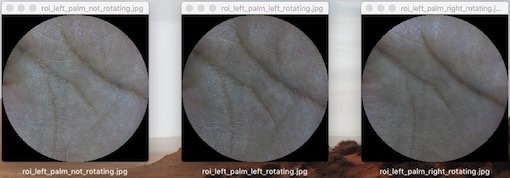
The palm image taken by the mobile phone has differences in angle, illumination, etc. The RobustPalmRoi algorithm reduces these differences through a series of handlers, thus extracting a stable ROI.
The following palms are taken by iPhoneX and have different angles. The corresponding ROI is below it.

Advantages of RobustPalmRoi algorithm:
- Lower extraction requirements, just use your mobile phone.
- Faster extraction speed, just tens of milliseconds.
- Higher extraction stability, eliminate the differences such as angle, illumination, etc.
Some tips for capturing palms on mobile phones:
- Five fingers open.
- Take the whole palm.
- Low illumination on the background.
Installation
Install library
There are some requirements if you want to install RobustPalmRoi library:
- OS Linux/Unix like.
OpenCVinstalled.yaml-cppinstalled. You should install it as a shared library. Stepgit clone https://github.com/jbeder/yaml-cpp.gitcd yaml-cpp && mkdir -p build && cd buildcmake -DBUILD_SHARED_LIBS=ON -DYAML_CPP_BUILD_TESTS=OFF -DYAML_CPP_BUILD_TOOLS=OFF -DYAML_CPP_BUILD_CONTRIB=OFF ..sudo make install
Steps:
git clone https://github.com/Leosocy/RobustPalmRoi.gitcd RobustPalmRoi && mkdir -p build && cd buildcmake .. && sudo make install
Install Python module
Please make sure the C++ library is installed successfully.
Python3.x required.
Steps:
cd pypackagepython setup.py install
Usage
C++
In your CMakeLists.txt, add these lines:
add_definitions(-std=c++11)
find_package(robust-palm-roi REQUIRED)
include_directories(${ROBUST_PALM_ROI_INCLUDE_DIR})
...
add_dependencies(${YOUR_PROJECT} ${ROBUST_PALM_ROI_LIBRARIES})
target_link_libraries(${YOUR_PROJECT} ${ROBUST_PALM_ROI_LIBRARIES})
Then you can use it in your source code like this:
#include <opencv2/highgui.hpp>
#include <robust-palm-roi/chain.h>
int main() {
rpr::ChainBuilder builder;
builder.SetConfigYaml(config_file_name);
auto chain = builder.BuildAndInitChain();
cv::Mat img = cv::imread(palm_image_file_name);
cv::Mat roi;
auto status = chain->Process(img, &roi);
if (status.IsOk()) {
cv::imshow("roi", roi);
}
return 0;
}
You can find the detail under samples/cpp_sample directory.
Python
from rpr import HandlerChain
chain = HandlerChain('your_config.yaml')
# Process image, and get bytes of roi, and save roi as image.
import io
with open('your_palm_image.png', 'rb') as palm:
roi_bytes = chain.process_image(palm)
roi = io.BytesIO(roi_bytes)
with open('your_roi_image.png', 'wb') as roi_image:
roi_image.write(roi.read())
You can find the detail under samples/py_sample directory.
Run samples
Make sure you have installed library and rpr.py before running examples.
Before you run cpp or python sample, please prepare some date follow this:
cd samples/palm_data./download.sh
Run cpp sample
cd cpp_samplemkdir build; cd build; cmake ..; make -j./run_cpp_sample
Run python sample
cd py_samplepython run_sample.py
Contributing
Please see CONTRIBUTING.md
