GlobustVP
[CVPR 2025 Best Paper Award Candidate & Oral] Convex Relaxation for Robust Vanishing Point Estimation in Manhattan World
Install / Use
/learn @WU-CVGL/GlobustVPREADME
![]()
![]()
Official implementation of the CVPR 2025 Award Candidate & Oral paper: "Convex Relaxation for Robust Vanishing Point Estimation in Manhattan World"
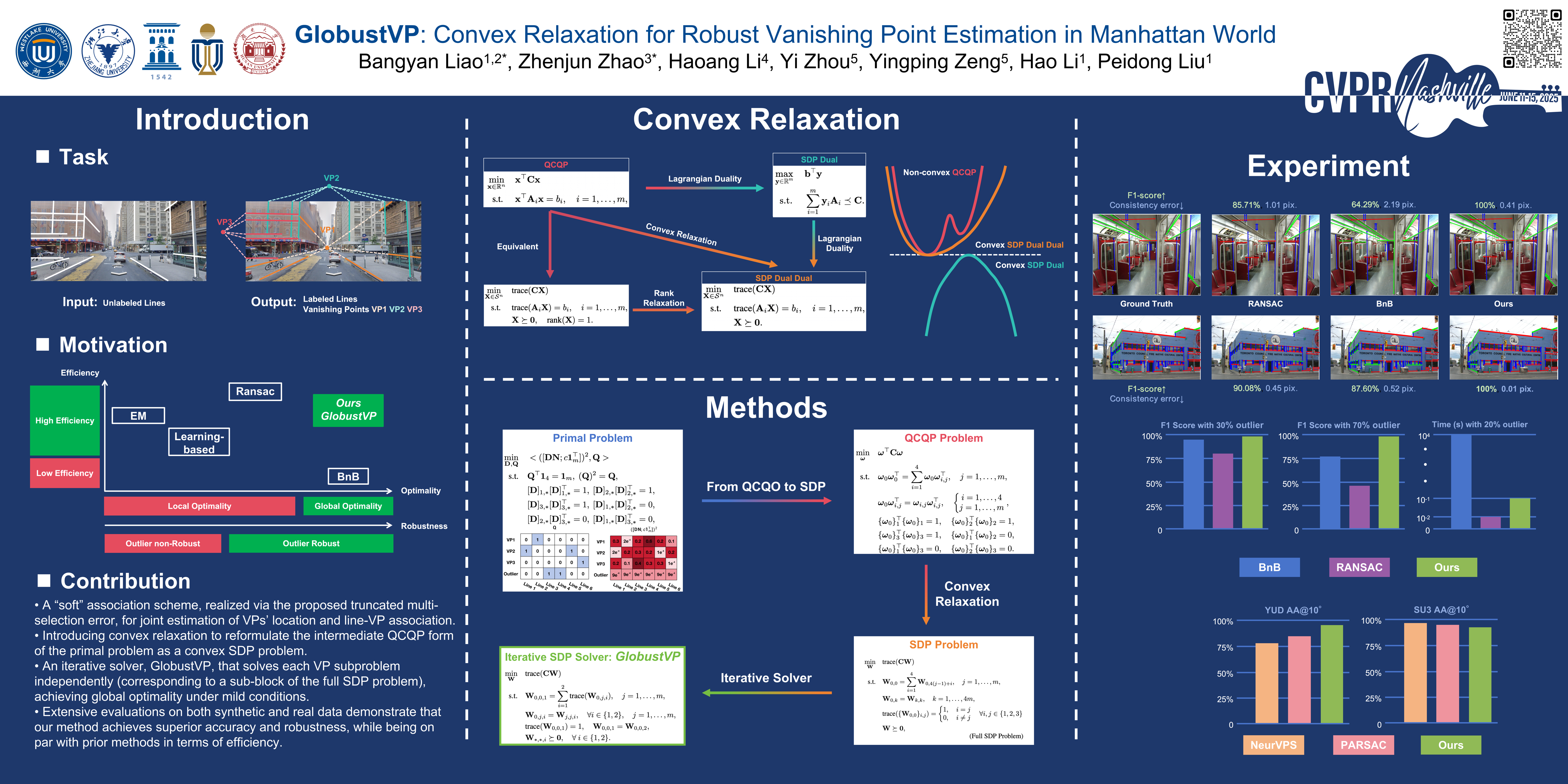
<p align="center"> <a href="https://arxiv.org/abs/2505.04788"> <img src="./assets/teaser.png" alt="Teaser" width=50%> </a> <br> <em>A globally optimal and outlier-robust method for vanishing point (VP) estimation in Manhattan world using convex relaxation.</em> </p>🔍 Overview
GlobustVP is a globally optimal and outlier-robust method for vanishing point (VP) estimation under the Manhattan World assumption. It introduces convex relaxation into VP estimation by formulating the problem as a quadratically constrained quadratic program (QCQP) and relaxing it into a convex semidefinite program (SDP). This avoids local minima and scales to realistic noise and outlier settings.
✨ Highlights
- Global optimality without initialization
- Robust up to 70% outliers
- Efficient runtime (~50ms/image)
- State-of-the-art performance on YUD and SU3 datasets
- No training or deep models required
📦 Installation and Demo 
Dependencies:
Install this repo and run the demo on a real image using LSD and SCS:
git clone https://github.com/WU-CVGL/GlobustVP.git && cd GlobustVP
python -m pip install -e .
Then open demo.ipynb locally, or try it online via using Google Colab.
🚀 Getting Started (Synthetic Evaluation)
1. Prepare config file
Create a JSON configuration file (e.g., default file config/param.json):
{
"line_num": 120,
"iteration": 100,
"outlier_ratio": [0.0, 0.1, 0.2, 0.3, 0.4, 0.5],
"sample_line_num": 6,
"vanishing_point_num": 3,
"endpoint_noise": 1.0,
"line_length": 4.0,
"gt_vp_noise": 0.001,
"c": 0.03,
"K": [[800, 0, 320], [0, 800, 240], [0, 0, 1]]
}
2. Run experiment
python -m globustvp.run_experiments --config globustvp/config/param.json
3. View results
- Results saved in
results/experiment_results.json - Figures saved in
figures/ - Boxplots of precision, recall, and F1-score are automatically generated
🧮 Getting Started (Real-World Data Evaluation — MATLAB)
We also provide a MATLAB-based evaluation pipeline for real-world images from the YUD dataset.
Entry point: real_yud_main.mlx
Dependencies:
- MATLAB (tested on R2024b or later)
Steps:
- Open
MATLAB/main/real_yud_main.mlxin MATLAB - Set the path to your YUD data
- Run the live script to reproduce real-world results
🧪 Try GlobustVP on Your Image
A minimal notebook demo is available in demo.ipynb, showing how to detect line segments and estimate vanishing points using GlobustVP.
Example code snippet
import numpy as np
from globustvp.solver.core import globustvp
from globustvp.utils.io import load_image_and_gray
from globustvp.utils.geometry import (
normalize_lines,
compute_backprojection_normals,
compute_line_uncertainties
)
from globustvp.utils.plot import plot_lines_on_image, visualize_line_vp_associations
from globustvp.utils.line_processing import detect_and_format_lines
# Step 1: Load input image
img, gray = load_image_and_gray("path/demo.jpg")
# Step 2: Detect 2D lines using LSD
lines_2D = detect_and_format_lines(gray_image=gray, min_length=30)
# Step 3: Normalize lines
K = np.array([[674.917975164175, 0, 307.551305282635],
[0, 674.917975164175, 251.454244960136],
[0, 0, 1]])
normalized_lines = normalize_lines(K, lines_2D).T
# Step 4: Back-project lines to plane normals
para_lines = compute_backprojection_normals(normalized_lines)
# Step 5: Assign uncertainty
uncertainty = compute_line_uncertainties(normalized_lines, K, use_uncertainty=True)
# Step 6: Run GlobustVP
param = {
"line_num": lines_2D.shape[1],
"vanishing_point_num": 3,
"c": 0.03,
"sample_line_num": 4,
"is_fast_solver": True,
"eigen_threshold": 1,
"solver": "SCS" # or MOSEK
}
status, est_vps, est_corrs = globustvp(normalized_lines, para_lines, uncertainty, param)
🗃️ Code Structure
├── solver/
│ ├── core.py # GlobustVP solver
│ ├── sdp_solver.py # SDP formulation and optimizer
│ └── solver_utils.py # Solver utilities (sampling, checks, recovery)
├── utils/
│ ├── data.py # Synthetic data generation
│ ├── experiment.py # Run single experiment
│ ├── geometry.py # Normalization and projection
│ ├── io.py # Config parsing and result saving
│ ├── line_processing.py # LSD detection and line filtering
│ ├── metrics.py # Evaluation metrics
│ └── plot.py # Visualization
├── run_experiments.py # Main script for synthetic experiments
└── demo.ipynb # Notebook demo on custom images
📊 Results
Synthetic data (F1-score vs. Outlier ratio)

Real-world results (YUD)
| Method | AA@3° | AA@5° | AA@10° | |--------------|-------|-------|--------| | J-Linkage [44] | 57.7 | 69.3 | 80.5 | | Quasi-VP [31] | 57.8 | 72.5 | 84.3 | | NeurVPS [51] | 52.2 | 64.2 | 78.1 | | GlobustVP 🏆 | 67.6 | 87.3 | 96.1 |
📁 Datasets
📝 Citation
If you use this code or paper, please consider citing:
@inproceedings{liao2025globustvp,
title={Convex Relaxation for Robust Vanishing Point Estimation in Manhattan World},
author={Liao, Bangyan and Zhao, Zhenjun and Li, Haoang and Zhou, Yi and Zeng, Yingping and Li, Hao and Liu, Peidong},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2025}
}
📬 Contact
For questions or feedback, feel free to contact:
