NeuralPDE.jl
Physics-Informed Neural Networks (PINN) Solvers of (Partial) Differential Equations for Scientific Machine Learning (SciML) accelerated simulation
Install / Use
/learn @SciML/NeuralPDE.jlREADME
NeuralPDE

![]()
![]()
![]()
![]()

NeuralPDE.jl is a solver package which consists of neural network solvers for partial differential equations using physics-informed neural networks (PINNs). This package utilizes neural stochastic differential equations to solve PDEs at a greatly increased generality compared with classical methods.
Installation
Assuming that you already have Julia correctly installed, it suffices to install NeuralPDE.jl in the standard way, that is, by typing ] add NeuralPDE. Note:
to exit the Pkg REPL-mode, just press <kbd>Backspace</kbd> or <kbd>Ctrl</kbd> + <kbd>C</kbd>.
Tutorials and Documentation
For information on using the package, see the stable documentation. Use the in-development documentation for the version of the documentation, which contains the unreleased features.
Features
- Physics-Informed Neural Networks for ODE, SDE, RODE, and PDE solving
- Ability to define extra loss functions to mix xDE solving with data fitting (scientific machine learning)
- Automated construction of Physics-Informed loss functions from a high level symbolic interface
- Sophisticated techniques like quadrature training strategies, adaptive loss functions, and neural adapters to accelerate training
- Integrated logging suite for handling connections to TensorBoard
- Handling of (partial) integro-differential equations and various stochastic equations
- Specialized forms for solving
ODEProblems with neural networks - Compatibility with Flux.jl and Lux.jl for all of the GPU-powered machine learning layers available from those libraries.
- Compatibility with NeuralOperators.jl for mixing DeepONets and other neural operators (Fourier Neural Operators, Graph Neural Operators, etc.) with physics-informed loss functions
Example: Solving 2D Poisson Equation via Physics-Informed Neural Networks
using NeuralPDE, Lux, ModelingToolkit, Optimization, OptimizationOptimisers
import DomainSets: Interval, infimum, supremum
@parameters x y
@variables u(..)
Dxx = Differential(x)^2
Dyy = Differential(y)^2
# 2D PDE
eq = Dxx(u(x, y)) + Dyy(u(x, y)) ~ -sin(pi * x) * sin(pi * y)
# Boundary conditions
bcs = [u(0, y) ~ 0.0, u(1, y) ~ 0,
u(x, 0) ~ 0.0, u(x, 1) ~ 0]
# Space and time domains
domains = [x ∈ Interval(0.0, 1.0),
y ∈ Interval(0.0, 1.0)]
# Discretization
dx = 0.1
# Neural network
dim = 2 # number of dimensions
chain = Lux.Chain(Dense(dim, 16, Lux.σ), Dense(16, 16, Lux.σ), Dense(16, 1))
discretization = PhysicsInformedNN(chain, QuadratureTraining())
@named pde_system = PDESystem(eq, bcs, domains, [x, y], [u(x, y)])
prob = discretize(pde_system, discretization)
callback = function (p, l)
println("Current loss is: $l")
return false
end
res = Optimization.solve(prob, ADAM(0.1); callback = callback, maxiters = 4000)
prob = remake(prob, u0 = res.minimizer)
res = Optimization.solve(prob, ADAM(0.01); callback = callback, maxiters = 2000)
phi = discretization.phi
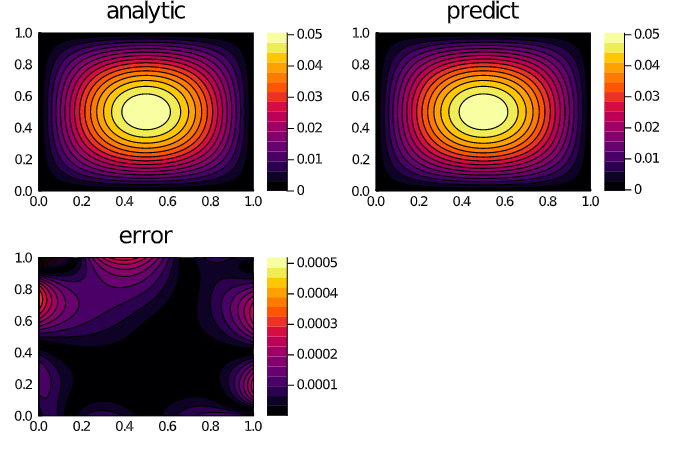
And some analysis:
xs, ys = [infimum(d.domain):(dx / 10):supremum(d.domain) for d in domains]
analytic_sol_func(x, y) = (sin(pi * x) * sin(pi * y)) / (2pi^2)
u_predict = reshape([first(phi([x, y], res.minimizer)) for x in xs for y in ys],
(length(xs), length(ys)))
u_real = reshape([analytic_sol_func(x, y) for x in xs for y in ys],
(length(xs), length(ys)))
diff_u = abs.(u_predict .- u_real)
using Plots
p1 = plot(xs, ys, u_real, linetype = :contourf, title = "analytic");
p2 = plot(xs, ys, u_predict, linetype = :contourf, title = "predict");
p3 = plot(xs, ys, diff_u, linetype = :contourf, title = "error");
plot(p1, p2, p3)
Citation
If you use NeuralPDE.jl in your research, please cite this paper:
@article{zubov2021neuralpde,
title={NeuralPDE: Automating Physics-Informed Neural Networks (PINNs) with Error Approximations},
author={Zubov, Kirill and McCarthy, Zoe and Ma, Yingbo and Calisto, Francesco and Pagliarino, Valerio and Azeglio, Simone and Bottero, Luca and Luj{\'a}n, Emmanuel and Sulzer, Valentin and Bharambe, Ashutosh and others},
journal={arXiv preprint arXiv:2107.09443},
year={2021}
}
Related Skills
YC-Killer
2.7kA library of enterprise-grade AI agents designed to democratize artificial intelligence and provide free, open-source alternatives to overvalued Y Combinator startups. If you are excited about democratizing AI access & AI agents, please star ⭐️ this repository and use the link in the readme to join our open source AI research team.
best-practices-researcher
The most comprehensive Claude Code skills registry | Web Search: https://skills-registry-web.vercel.app
research_rules
Research & Verification Rules Quote Verification Protocol Primary Task "Make sure that the quote is relevant to the chapter and so you we want to make sure that we want to have it identifie
groundhog
398Groundhog's primary purpose is to teach people how Cursor and all these other coding agents work under the hood. If you understand how these coding assistants work from first principles, then you can drive these tools harder (or perhaps make your own!).
