AutostereogramSolver
Auto stereogram builder/solver
Install / Use
/learn @MikhailPedus/AutostereogramSolverREADME

Auto Stereogram Solver
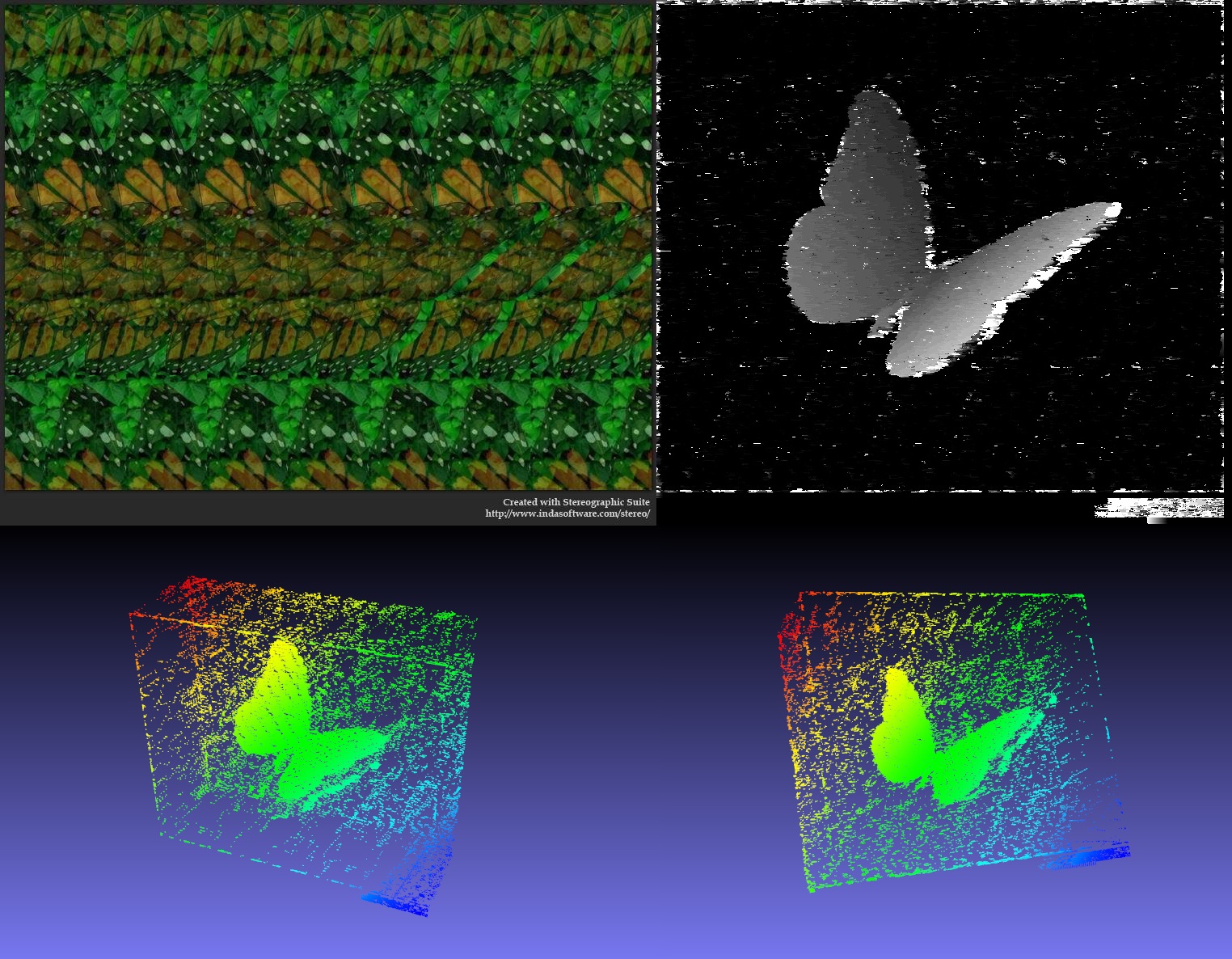
Attempts to solve autostereograms programmatically.
How it works
The algorithm for finding a solution is relatively straightforward.
The first step involves finding the offset at which the autostereogram repeats. This is accomplished by calculating the total pixel difference between the image and an overlap of itself at various offsets over a reasonable subsection of the image. The minimal diff is chosen as the offset.
The second step applies the offset to the image and calculates the absolute diff for the remainder of the image. Borders are added to compensate for the loss of an offset's worth of pixels.
Although simple, this algorithm seems to work relatively well and is efficient to execute, although there is a small chance that it won't determine the correct offset for the autostereogram.
Install
# Required dependencies.
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libvtk5-dev
# Configure and compile opencv with "viz" module.
git clone https://github.com/opencv/opencv.git -b 2.4 opencv
cd opencv
mkdir release
cd release
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_VTK=ON -D BUILD_opencv_flann=OFF -D BUILD_opencv_features2d=OFF -D BUILD_opencv_calib3d=OFF -D BUILD_opencv_ml=OFF -D BUILD_opencv_video=OFF -D BUILD_opencv_legacy=OFF -D BUILD_opencv_objdetect=OFF -D BUILD_opencv_photo=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_ocl=OFF -D BUILD_opencv_nonfree=OFF -D BUILD_opencv_contrib=OFF -D BUILD_opencv_java=OFF -D BUILD_opencv_superres=OFF -D BUILD_opencv_ts=OFF -D BUILD_opencv_videostab=OFF .. && make
sudo make install
#Go to root directory.
cd ../../
# Create a build directory.
mkdir build
cd build
# Build and run.
cmake .. && make
# For building stereogram:
./stereogramBuilder -t ../texture/texture_1.jpg -d ../depthmap/shark.jpg
# For solving stereogram:
./stereogramSolver -s buildOutput.jpg
# For display result in 3d:
./pointsCloudDisplayer -c outSolverCloud.ply
Related Skills
node-connect
349.0kDiagnose OpenClaw node connection and pairing failures for Android, iOS, and macOS companion apps
frontend-design
109.4kCreate distinctive, production-grade frontend interfaces with high design quality. Use this skill when the user asks to build web components, pages, or applications. Generates creative, polished code that avoids generic AI aesthetics.
openai-whisper-api
349.0kTranscribe audio via OpenAI Audio Transcriptions API (Whisper).
qqbot-media
349.0kQQBot 富媒体收发能力。使用 <qqmedia> 标签,系统根据文件扩展名自动识别类型(图片/语音/视频/文件)。
