Mola
A Modular Optimization framework for Localization and mApping (MOLA)
Install / Use
/learn @MOLAorg/MolaREADME
| Distro | Build dev | Release |
| --- | --- | --- |
| ROS 2 Humble (u22.04) | |

|

|

|

| EOL Distro | Last Release |
| --- | ---
| ROS 2 Iron (u22.04) | 
🤖 What is MOLA?
MOLA (Modular Optimization framework for Localization and mApping) is a modular, extensible, and high-performance framework for robotics localization and 🗺️ mapping.
This repository contains the base open-sourced packages for the MOLA project. Other packages exist under the MOLAorg organization.
Refer to the official documentation for build instructions, demos, API reference, etc.
🗺️ Features
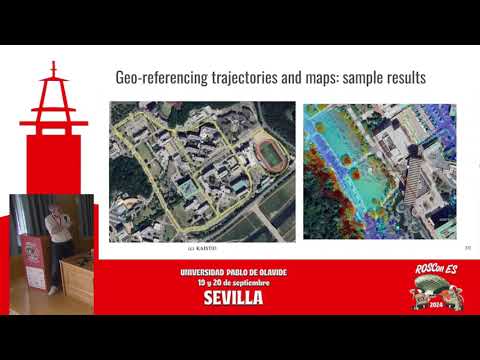
- 📍 LiDAR Odometry (LO), LiDAR-Inertial Odometry (LIO), geo-referenced maps, sensor fusion
- 🧩 Plug-and-play modules to build configurable ICP and SLAM pipelines
- 🤖 ROS 2 ready (Humble, Jazzy, Kilted, Rolling) but also usable from standalone pure C++
🚀 Demo videos
Lidar-Inertial-Odometry (LIO) demo with Oxford Spires:
Lidar-Odometry (LO) demo with KITTI:
ROSCon Talk introducing MOLA
Video (Slides):
Individual package build status
Note: Rows within each cell are for amd64 and arm64 architectures.
| Package | ROS 2 Humble <br/> BinBuild | ROS 2 Jazzy <br/> BinBuild | ROS 2 Kilted <br/> BinBuild | ROS 2 Rolling <br/> BinBuild |
| --- | --- | --- | --- | --- |
| kitti_metrics_eval | <br>
|
<br>
|
<br>
|
<br>
|
| mola |
<br>
|
<br>
|
<br>
|
<br>
|
| mola_bridge_ros2 |
<br>
|
<br>
|
<br>
|
<br>
|
| mola_demos |
<br>
|
<br>
|
<br> [.
commit-push-pr
83.4kCommit, push, and open a PR
